

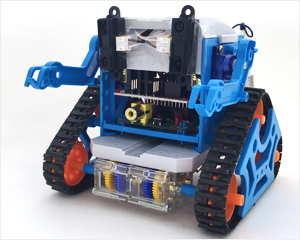
カムロボは自由にセットできるカムを使って動きをプログラムできるロボット工作です。
モーターを2個搭載して三角形のクローラーで進み、左右の腕も動きます。カムを差し込んだプログラムバーをロボットの中央にセット。内部のギヤでバーを移動させてカムの配列を機械的に読み取り、車体下のステアリングレッグを押し下げて、クローラーを浮かせることで動きを変化させます。

ミニ四駆を探してさまよい歩くカムロボ


※本改造でのご使用は、株式会社タミヤの保証対象外となる場合があります。改造はお客様の任意で行ってください。

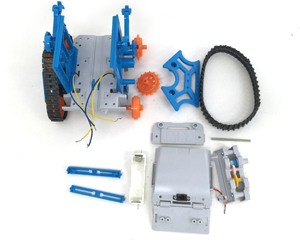
本体から、顔、ルーフ、サイドフレームサポート、履帯、ホイールカバー、ホイール(右側の真ん中のみ)、プログラムギアケースを取り外します。ルーフから電池ボックスを取り外します。

本体裏から、ステアリングレッグを取り外します。
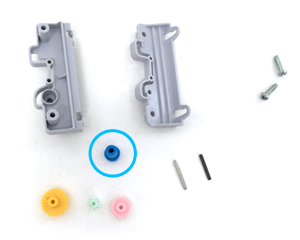
プログラムバーギヤケースを解体して、青色の部品を取り出します。
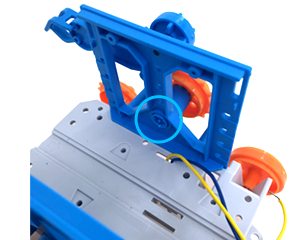
取り出した青色の部品と、カムプログラムロボット工作セットに付属の3x27mm六角シャフトを使い、ホイールを取り付けます。
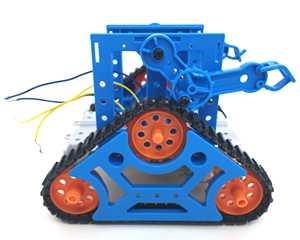
履帯とホイールカバーを取り付けます。
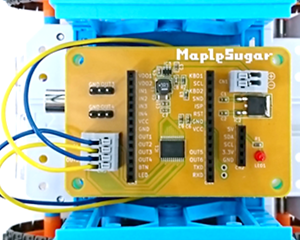
IchigoJamとMapleSugarをピンと穴がずれないように差し込みます。
MapleSugarのピンは全てIchigoJamに差し込めるようになっています。
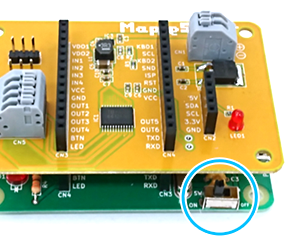
IchigoJamのスイッチをONにします。
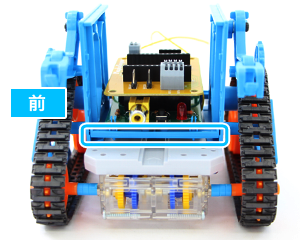
サイドフレームサポートを一番下の段に取り付け、IchigoJamを設置します。IchigoJamはビデオ端子のある側を前にします。
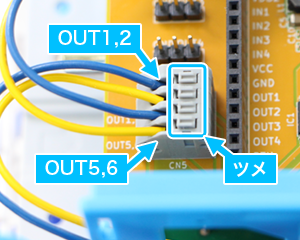
カムロボの左手側の線を青色、黄色の順にMapleSugarのOUT1,2にツメを押しながらコードを差し込みます。
カムロボの右手側の線を青色、黄色の順にMapleSugarのOUT5,6にツメを押しながらコードを差し込みます。
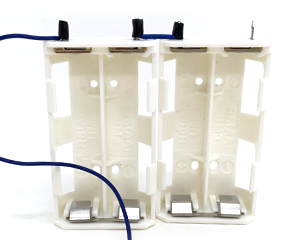
電池ボックス2つを作成し、接続します。マイナスには青色の被覆線を接続します。
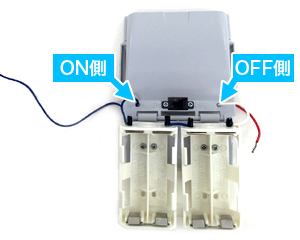
ルーフに電池ボックスを取り付けます。スイッチから出ている白色の被覆線をOFF側の穴に通し、プラスに接続します。青色の被覆線をON側の穴に通します。
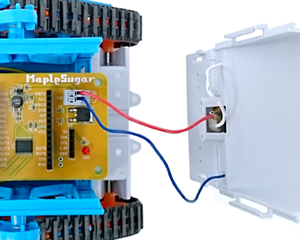
スイッチから出ている赤色の被覆線をMapleSugarのプラスに、電池ボックスから出ている青色の被覆線をMapleSugarのマイナスに接続します。

顔とルーフを取り付けて完成です。

顔、ルーフ、アームを取り外します。
アームから歯車を取り外します。
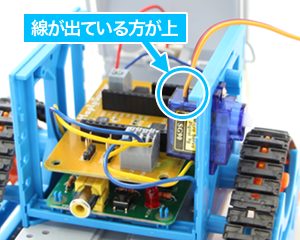
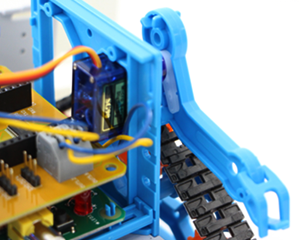
サーボモーターにアームを取り付ける前に、サーボモーターを本体に取り付けます。サーボモーターは、線が出ている方が上になります。
もともとアームが付いていた所の少し前側にある小さい穴にサーボモーター付属のネジで固定します。

白いパーツの中でも、片側だけ伸びているものをサーボモーターに取り付け、限界まで回してから一度外します。左腕は反時計回り、右腕は時計回りです。
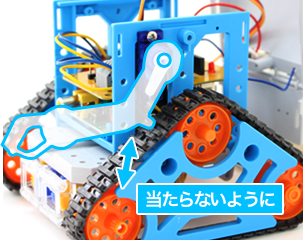
腕を取り付けた時に腕がゴムベルトに当たらない様な角度で、白いパーツを再度取り付けます。
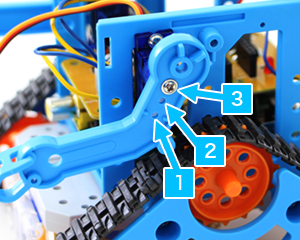
アームにある3つ並んでいる穴のうち、一番上の穴(3)と、サーボモーターの真ん中の穴が合うようにネジで固定します(ネジはサーボモーターのセットに付属しています)。
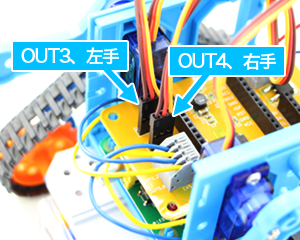
MapleSugarのOUT3に左手側のサーボモーターの線を、OUT4に右手側の線を接続します。
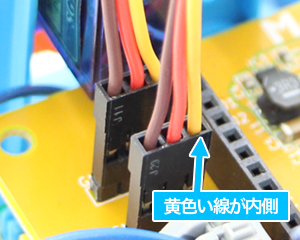
黄色の線の方がカムロボの内側を向くように接続します。

もう一度ルーフと顔を取り付けて完成です。


顔とルーフを取り外します。
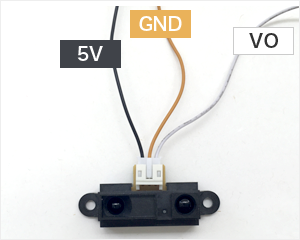
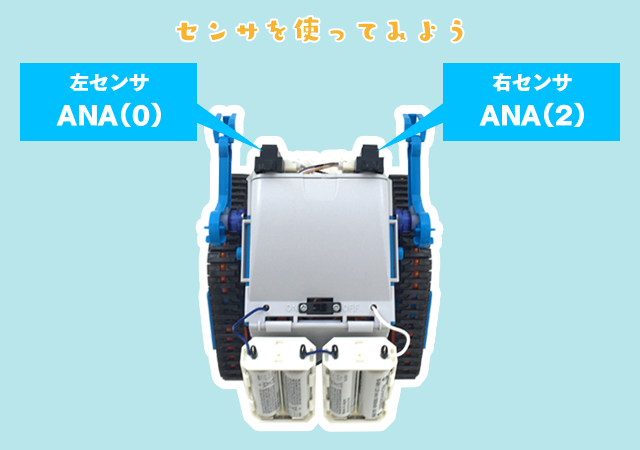
センサの線は向かって左から5V、GND、VOになります。

センサの5VをMapleSugarの5V、GNDをGNDに繋ぎます。右手側のセンサのVOをIN2、左手側のセンサのVOをBTNに接続します。
※写真では5Vの接続にミニブレッドボードとジャンパー線を使用していますが、電気的に接続されれば、ビニールテープ等による固定でも代替可能です。
顔とルーフを取り付け、顔にセロテープなどでセンサを固定したら完成です。
(テープなどがセンサの目に被らないようにしてください。)
カムロボフェイスの3Dデータを利用して、オリジナルフェイスを作成してみよう!

商品の購入はこちら